I modified the last demo so that it could capture real-time camera feeds.

Things used in this project:
A Blade 3 board, an HDMI cable, a monitor, a Type C USB hub and a USB camera (this demonstration uses a Logitech c922 USB camera)
First, build the YOLOv5 demo on Blade 3:
- Install adb on the Debian system. You can find some tutorials on Google about how to install it. To use the terminal, you can also connect a keyboard to the Blade 3.(change to root command
sudo su) - adb shell into the Blade 3
- Install necessary packages on Blade 3 (You can choose another sources.list if yours is slow. For more information about how to change the Debian sources.list, simply search Google.)
apt update
apt install gcc cmake git build-essential
- install opencv lib
apt-get install libopencv-dev python3-opencv
- Install the NPU demo on Blade 3. (download links: GitHub - rockchip-linux/rknpu2, use YOLOv5 small model)
cd /data
git clone https://github.com/rockchip-linux/rknpu2.git
- Enter into YOLOv5 demo directory
cd /data/rknpu2/examples/rknn_yolov5_demo
Because the videoio and highgui libraries of OpenCV are not provided by the official, I have to compile the program and install OpenCV.
- use vi command edit build-linux_RK3588.sh. change GCC_COMPILER and LD_LIBRARY_PATH.
set -e
TARGET_SOC="rk3588"
GCC_COMPILER=/usr/bin/aarch64-linux-gnu
export LD_LIBRARY_PATH=/usr/lib/aarch64-linux-gnu:$LD_LIBRARY_PATH
export CC=${GCC_COMPILER}-gcc
export CXX=${GCC_COMPILER}-g++
ROOT_PWD=$( cd "$( dirname $0 )" && cd -P "$( dirname "$SOURCE" )" && pwd )
# build
BUILD_DIR=${ROOT_PWD}/build/build_linux_aarch64
if [[ ! -d "${BUILD_DIR}" ]]; then
mkdir -p ${BUILD_DIR}
fi
cd ${BUILD_DIR}
cmake ../.. -DCMAKE_SYSTEM_NAME=Linux -DTARGET_SOC=${TARGET_SOC}
make -j4
make install
cd -
- Download CMakeList.txt, which uses system opencv lib to the computer.
cmake_minimum_required(VERSION 3.4.1)
project(rknn_yolov5_demo)
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
# skip 3rd-party lib dependencies
set(CMAKE_EXE_LINKER_FLAGS "${CMAKE_EXE_LINKER_FLAGS} -Wl,--allow-shlib-undefined")
# install target and libraries
set(CMAKE_INSTALL_PREFIX ${CMAKE_SOURCE_DIR}/install/rknn_yolov5_demo_${CMAKE_SYSTEM_NAME})
set(CMAKE_SKIP_INSTALL_RPATH FALSE)
set(CMAKE_BUILD_WITH_INSTALL_RPATH TRUE)
set(CMAKE_INSTALL_RPATH "${CMAKE_INSTALL_PREFIX}/lib")
# rknn api
if(TARGET_SOC STREQUAL "rk356x")
set(RKNN_API_PATH ${CMAKE_SOURCE_DIR}/../../runtime/RK356X/${CMAKE_SYSTEM_NAME}/librknn_api)
elseif(TARGET_SOC STREQUAL "rk3588")
set(RKNN_API_PATH ${CMAKE_SOURCE_DIR}/../../runtime/RK3588/${CMAKE_SYSTEM_NAME}/librknn_api)
else()
message(FATAL_ERROR "TARGET_SOC is not set, ref value: rk356x or rk3588 or rv110x")
endif()
if (CMAKE_SYSTEM_NAME STREQUAL "Android")
set(RKNN_RT_LIB ${RKNN_API_PATH}/${CMAKE_ANDROID_ARCH_ABI}/librknnrt.so)
else()
if (CMAKE_C_COMPILER MATCHES "aarch64")
set(LIB_ARCH aarch64)
else()
set(LIB_ARCH armhf)
endif()
set(RKNN_RT_LIB ${RKNN_API_PATH}/${LIB_ARCH}/librknnrt.so)
endif()
include_directories(${RKNN_API_PATH}/include)
include_directories(/usr/include)
include_directories(/usr/include/opencv4)
set(OpenCV_DIR "/usr/lib/aarch64-linux-gun")
find_package(OpenCV REQUIRED COMPONENTS core imgproc imgcodecs video videoio highgui)
#rga
if(TARGET_SOC STREQUAL "rk356x")
set(RGA_PATH ${CMAKE_SOURCE_DIR}/../3rdparty/rga/RK356X)
elseif(TARGET_SOC STREQUAL "rk3588")
set(RGA_PATH ${CMAKE_SOURCE_DIR}/../3rdparty/rga/RK3588)
else()
message(FATAL_ERROR "TARGET_SOC is not set, ref value: rk356x or rk3588")
endif()
if (CMAKE_SYSTEM_NAME STREQUAL "Android")
set(RGA_LIB ${RGA_PATH}/lib/Android/${CMAKE_ANDROID_ARCH_ABI}/librga.so)
else()
if (CMAKE_C_COMPILER MATCHES "aarch64")
set(LIB_ARCH aarch64)
else()
set(LIB_ARCH armhf)
endif()
set(RGA_LIB ${RGA_PATH}/lib/Linux//${LIB_ARCH}/librga.so)
endif()
include_directories( ${RGA_PATH}/include)
set(CMAKE_INSTALL_RPATH "lib")
# rknn_yolov5_demo
include_directories( ${CMAKE_SOURCE_DIR}/include)
add_executable(rknn_yolov5_demo
src/main.cc
src/postprocess.cc
)
target_link_libraries(rknn_yolov5_demo
${RKNN_RT_LIB}
${RGA_LIB}
${OpenCV_LIBS}
)
# install target and libraries
set(CMAKE_INSTALL_PREFIX ${CMAKE_SOURCE_DIR}/install/rknn_yolov5_demo_${CMAKE_SYSTEM_NAME})
install(TARGETS rknn_yolov5_demo DESTINATION ./)
install(PROGRAMS ${RKNN_RT_LIB} DESTINATION lib)
install(PROGRAMS ${RGA_LIB} DESTINATION lib)
install(DIRECTORY model DESTINATION ./)
- Copy the CMakeLists.txt file from the computer to the Blade 3 board via scp command. (account: mixtile; password: mixtile )
scp CMakeLists.txt mixtile@192.168.202.74:/home/mixtile/
- Download the main.cc file to the computer.
// Copyright (c) 2021 by Rockchip Electronics Co., Ltd. All Rights Reserved.
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
/*-------------------------------------------
Includes
-------------------------------------------*/
#include <dlfcn.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/time.h>
#include <chrono>
#include <ctime>
#define _BASETSD_H
#include "RgaUtils.h"
#include "im2d.h"
#include "opencv2/core/core.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/opencv.hpp"
#include "opencv2/videoio.hpp"
#include "opencv2/highgui.hpp"
#include "postprocess.h"
#include "rga.h"
#include "rknn_api.h"
#define PERF_WITH_POST 1
/*-------------------------------------------
Functions
-------------------------------------------*/
static void dump_tensor_attr(rknn_tensor_attr* attr)
{
printf(" index=%d, name=%s, n_dims=%d, dims=[%d, %d, %d, %d], n_elems=%d, size=%d, fmt=%s, type=%s, qnt_type=%s, "
"zp=%d, scale=%f\n",
attr->index, attr->name, attr->n_dims, attr->dims[0], attr->dims[1], attr->dims[2], attr->dims[3],
attr->n_elems, attr->size, get_format_string(attr->fmt), get_type_string(attr->type),
get_qnt_type_string(attr->qnt_type), attr->zp, attr->scale);
}
double __get_us(struct timeval t) { return (t.tv_sec * 1000000 + t.tv_usec); }
static unsigned char* load_data(FILE* fp, size_t ofst, size_t sz)
{
unsigned char* data;
int ret;
data = NULL;
if (NULL == fp) {
return NULL;
}
ret = fseek(fp, ofst, SEEK_SET);
if (ret != 0) {
printf("blob seek failure.\n");
return NULL;
}
data = (unsigned char*)malloc(sz);
if (data == NULL) {
printf("buffer malloc failure.\n");
return NULL;
}
ret = fread(data, 1, sz, fp);
return data;
}
static unsigned char* load_model(const char* filename, int* model_size)
{
FILE* fp;
unsigned char* data;
fp = fopen(filename, "rb");
if (NULL == fp) {
printf("Open file %s failed.\n", filename);
return NULL;
}
fseek(fp, 0, SEEK_END);
int size = ftell(fp);
data = load_data(fp, 0, size);
fclose(fp);
*model_size = size;
return data;
}
static int saveFloat(const char* file_name, float* output, int element_size)
{
FILE* fp;
fp = fopen(file_name, "w");
for (int i = 0; i < element_size; i++) {
fprintf(fp, "%.6f\n", output[i]);
}
fclose(fp);
return 0;
}
int inputKnn(cv::Mat &orig_img, rknn_context &ctx);
int main(int argc, char** argv){
char* model_name = NULL;
if (argc != 5) {
printf("Usage: %s <rknn model> </dev/viedo number> <vedio width> <vedio height>\n", argv[0]);
return -1;
}
model_name = (char*)argv[1];
int num = atoi((char*)argv[2]);
printf("Read video%d ...\n", num);
int capWidth = atoi((char*)argv[3]);
int capHeight = atoi((char*)argv[4]);
cv::namedWindow("Video Player");//Declaring the video to show the video//
cv::VideoCapture cap(num);//Declaring an object to capture stream of frames from third camera//
if (!cap.isOpened()){ //This section prompt an error message if no video stream is found//
printf("No video stream detected");
return-1;
}
//Set the resolution
cap.set(cv::CAP_PROP_FRAME_WIDTH, capWidth);
cap.set(cv::CAP_PROP_FRAME_HEIGHT, capHeight);
cap.set(cv::CAP_PROP_FOURCC, cv::VideoWriter::fourcc('M','J','P','G'));
int ret = -1;
rknn_context ctx;
/* Create the neural network */
printf("Loading mode...\n");
int model_data_size = 0;
unsigned char* model_data = load_model(model_name, &model_data_size);
ret = rknn_init(&ctx, model_data, model_data_size, 0, NULL);
if (ret < 0) {
printf("rknn_init error ret=%d\n", ret);
return -1;
}
int fpsCamera = 70;
int fpsCapture = 10;
std::chrono::time_point<std::chrono::high_resolution_clock> prev_frame_time(std::chrono::high_resolution_clock::now());
std::chrono::time_point<std::chrono::high_resolution_clock> new_frame_time;
while (true){ //Taking an everlasting loop to show the video//
cv::Mat orig_img;
printf("start.\n");
cap >> orig_img;
if (orig_img.empty()){ //Breaking the loop if no video frame is detected//
break;
}
inputKnn(orig_img, ctx);
if (orig_img.empty()){ //Breaking the loop if no video frame is detected//
break;
}
new_frame_time = std::chrono::high_resolution_clock::now();
std::chrono::duration<double> duration1(new_frame_time - prev_frame_time);
double fps = 1/duration1.count();
std::cout << "fps : " << fps << std::endl;
if(duration1.count() > 1/fpsCapture)
{
prev_frame_time = new_frame_time;
cv::imshow("Video Player", orig_img);
}
char c = (char)cv::waitKey(3);
if (c == 27)
{
break; // (27)escape key
}
}
// release
ret = rknn_destroy(ctx);
if (model_data) {
free(model_data);
}
cap.release();//Releasing the buffer memory//
return 0;
}
int inputKnn(cv::Mat &orig_img, rknn_context &ctx)
{
int status = 0;
// char* model_name = NULL;
// rknn_context ctx;
size_t actual_size = 0;
int img_width = 0;
int img_height = 0;
int img_channel = 0;
const float nms_threshold = NMS_THRESH;
const float box_conf_threshold = BOX_THRESH;
struct timeval start_time, stop_time;
int ret;
// init rga context
rga_buffer_t src;
rga_buffer_t dst;
im_rect src_rect;
im_rect dst_rect;
memset(&src_rect, 0, sizeof(src_rect));
memset(&dst_rect, 0, sizeof(dst_rect));
memset(&src, 0, sizeof(src));
memset(&dst, 0, sizeof(dst));
//printf("Read %s ...\n", image_name);
//cv::Mat orig_img = cv::imread(image_name, 1);
//if (!orig_img.data) {
// printf("cv::imread %s fail!\n", image_name);
// return -1;
//}
cv::Mat img;
cv::cvtColor(orig_img, img, cv::COLOR_BGR2RGB);
img_width = img.cols;
img_height = img.rows;
printf("img width = %d, img height = %d\n", img_width, img_height);
/* Create the neural network */
//printf("Loading mode...\n");
//int model_data_size = 0;
//unsigned char* model_data = load_model(model_name, &model_data_size);
rknn_sdk_version version;
ret = rknn_query(ctx, RKNN_QUERY_SDK_VERSION, &version, sizeof(rknn_sdk_version));
if (ret < 0) {
printf("rknn_init error ret=%d\n", ret);
return -1;
}
printf("sdk version: %s driver version: %s\n", version.api_version, version.drv_version);
rknn_input_output_num io_num;
memset(&io_num,0,sizeof(rknn_input_output_num));
ret = rknn_query(ctx, RKNN_QUERY_IN_OUT_NUM, &io_num, sizeof(io_num));
if (ret < 0) {
printf("rknn_init error ret=%d\n", ret);
return -1;
}
printf("model input num: %d, output num: %d\n", io_num.n_input, io_num.n_output);
rknn_tensor_attr input_attrs[io_num.n_input];
memset(input_attrs, 0, sizeof(input_attrs));
for (int i = 0; i < io_num.n_input; i++) {
input_attrs[i].index = i;
ret = rknn_query(ctx, RKNN_QUERY_INPUT_ATTR, &(input_attrs[i]), sizeof(rknn_tensor_attr));
if (ret < 0) {
printf("rknn_init error ret=%d\n", ret);
return -1;
}
dump_tensor_attr(&(input_attrs[i]));
}
rknn_tensor_attr output_attrs[io_num.n_output];
memset(output_attrs, 0, sizeof(output_attrs));
for (int i = 0; i < io_num.n_output; i++) {
output_attrs[i].index = i;
ret = rknn_query(ctx, RKNN_QUERY_OUTPUT_ATTR, &(output_attrs[i]), sizeof(rknn_tensor_attr));
dump_tensor_attr(&(output_attrs[i]));
}
int channel = 3;
int width = 0;
int height = 0;
if (input_attrs[0].fmt == RKNN_TENSOR_NCHW) {
printf("model is NCHW input fmt\n");
channel = input_attrs[0].dims[1];
height = input_attrs[0].dims[2];
width = input_attrs[0].dims[3];
} else {
printf("model is NHWC input fmt\n");
height = input_attrs[0].dims[1];
width = input_attrs[0].dims[2];
channel = input_attrs[0].dims[3];
}
printf("model input height=%d, width=%d, channel=%d\n", height, width, channel);
rknn_input inputs[1];
memset(inputs, 0, sizeof(inputs));
inputs[0].index = 0;
inputs[0].type = RKNN_TENSOR_UINT8;
inputs[0].size = width * height * channel;
inputs[0].fmt = RKNN_TENSOR_NHWC;
inputs[0].pass_through = 0;
// You may not need resize when src resulotion equals to dst resulotion
void* resize_buf = nullptr;
if (img_width != width || img_height != height) {
printf("resize with RGA!\n");
resize_buf = malloc(height * width * channel);
memset(resize_buf, 0x00, height * width * channel);
src = wrapbuffer_virtualaddr((void*)img.data, img_width, img_height, RK_FORMAT_RGB_888);
dst = wrapbuffer_virtualaddr((void*)resize_buf, width, height, RK_FORMAT_RGB_888);
ret = imcheck(src, dst, src_rect, dst_rect);
if (IM_STATUS_NOERROR != ret) {
printf("%d, check error! %s", __LINE__, imStrError((IM_STATUS)ret));
return -1;
}
IM_STATUS STATUS = imresize(src, dst);
// for debug
// cv::Mat resize_img(cv::Size(width, height), CV_8UC3, resize_buf);
// cv::imwrite("resize_input.jpg", resize_img);
inputs[0].buf = resize_buf;
} else {
inputs[0].buf = (void*)img.data;
}
gettimeofday(&start_time, NULL);
rknn_inputs_set(ctx, io_num.n_input, inputs);
rknn_output outputs[io_num.n_output];
memset(outputs, 0, sizeof(outputs));
for (int i = 0; i < io_num.n_output; i++) {
outputs[i].want_float = 0;
}
ret = rknn_run(ctx, NULL);
ret = rknn_outputs_get(ctx, io_num.n_output, outputs, NULL);
gettimeofday(&stop_time, NULL);
printf("once run use %f ms\n", (__get_us(stop_time) - __get_us(start_time)) / 1000);
// post process
float scale_w = (float)width / img_width;
float scale_h = (float)height / img_height;
detect_result_group_t detect_result_group;
std::vector<float> out_scales;
std::vector<int32_t> out_zps;
for (int i = 0; i < io_num.n_output; ++i) {
out_scales.push_back(output_attrs[i].scale);
out_zps.push_back(output_attrs[i].zp);
}
printf("before post_process\n");
post_process((int8_t*)outputs[0].buf, (int8_t*)outputs[1].buf, (int8_t*)outputs[2].buf, height, width,
box_conf_threshold, nms_threshold, scale_w, scale_h, out_zps, out_scales, &detect_result_group);
// Draw Objects
char text[256];
for (int i = 0; i < detect_result_group.count; i++) {
detect_result_t* det_result = &(detect_result_group.results[i]);
sprintf(text, "%s %.1f%%", det_result->name, det_result->prop * 100);
printf("%s @ (%d %d %d %d) %f\n", det_result->name, det_result->box.left, det_result->box.top,
det_result->box.right, det_result->box.bottom, det_result->prop);
int x1 = det_result->box.left;
int y1 = det_result->box.top;
int x2 = det_result->box.right;
int y2 = det_result->box.bottom;
rectangle(orig_img, cv::Point(x1, y1), cv::Point(x2, y2), cv::Scalar(255, 0, 0, 255), 3);
putText(orig_img, text, cv::Point(x1, y1 + 12), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
}
// imwrite("./out.jpg", orig_img);
ret = rknn_outputs_release(ctx, io_num.n_output, outputs);
// loop test
int test_count = 1;
gettimeofday(&start_time, NULL);
for (int i = 0; i < test_count; ++i) {
rknn_inputs_set(ctx, io_num.n_input, inputs);
ret = rknn_run(ctx, NULL);
ret = rknn_outputs_get(ctx, io_num.n_output, outputs, NULL);
#if PERF_WITH_POST
post_process((int8_t*)outputs[0].buf, (int8_t*)outputs[1].buf, (int8_t*)outputs[2].buf, height, width,
box_conf_threshold, nms_threshold, scale_w, scale_h, out_zps, out_scales, &detect_result_group);
#endif
ret = rknn_outputs_release(ctx, io_num.n_output, outputs);
}
gettimeofday(&stop_time, NULL);
printf("loop count = %d , average run %f ms\n", test_count,
(__get_us(stop_time) - __get_us(start_time)) / 1000.0 / test_count);
//deinitPostProcess();
if (resize_buf) {
free(resize_buf);
}
return 0;
}
- Copy the main.cc file to the Blade 3 board via scp command. (account: mixtile; password: mixtile )
scp main.cc mixtile@192.168.202.74:/home/mixtile/
- Move the main.cc and CMakeLists.txt files to the specified folder, as shown below.
chown root:root /home/mixtile/main.cc
chown root:root /home/mixtile/CMakeLists.txt
mv /home/mixtile/main.cc /data/rknpu2/examples/rknn_yolov5_demo/src/main.cc
mv /home/mixtile/CMakeLists.txt /data/rknpu2/examples/rknn_yolov5_demo/CMakeLists.txt
- build the demo
./build-linux_RK3588.sh
- run the demo(./rknn_yolov5_demo model videoNum(/dev/video18) width height)
cd install/rknn_yolov5_demo_Linux
./rknn_yolov5_demo ./model/RK3588/yolov5s-640-640.rknn 18 1920 1080
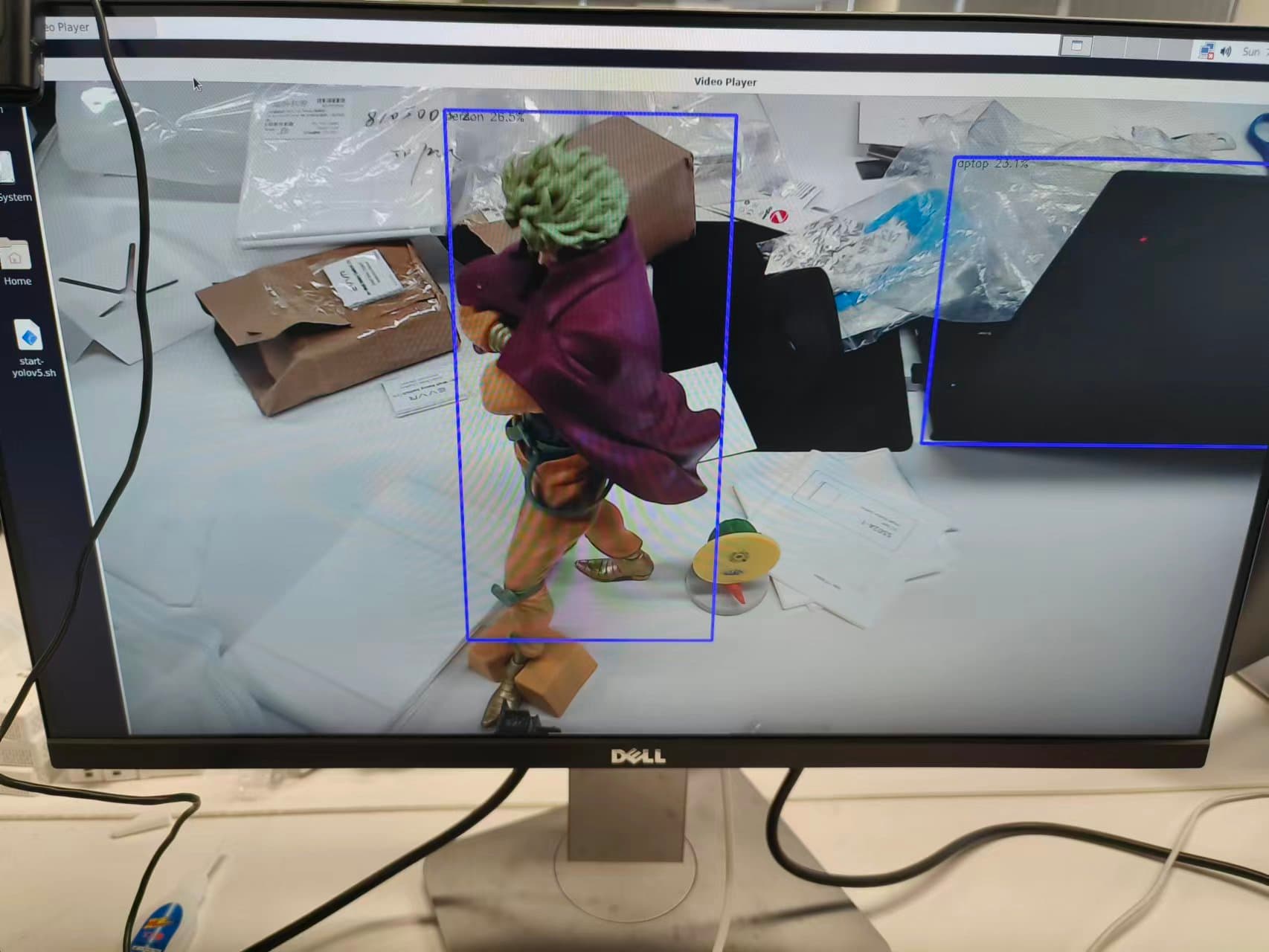
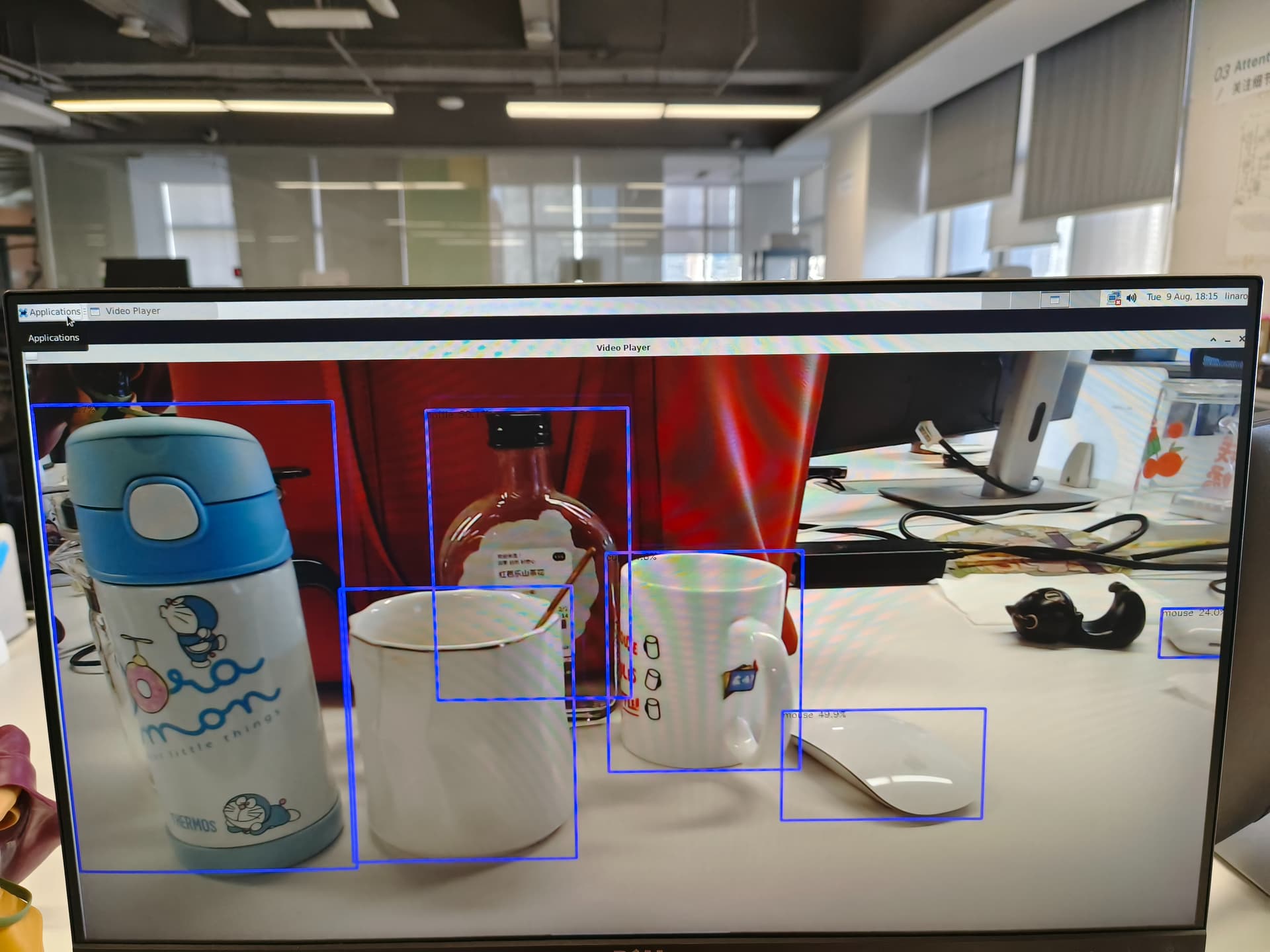
To check if it worked, I started snapping casually around the office.
It recognized my cups and bottles, one mouse is right, but another is actually an earphone case lol
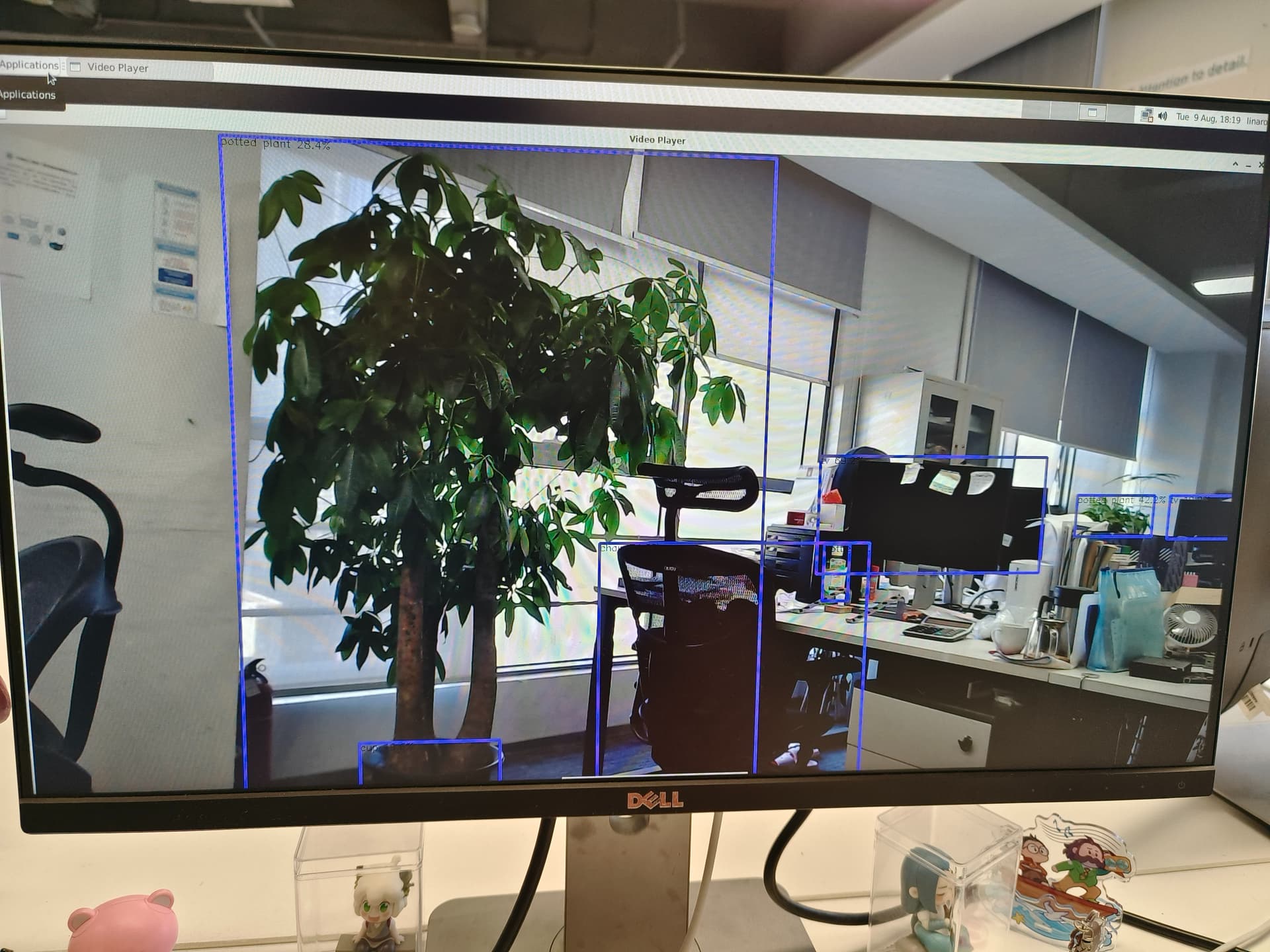
My next-door colleague’s seat, the plant, his chair and display, the bottle on his desk, and so on.
There is a little Easter Egg, one of my anime figure is also identified as a “person”, though only 26.5% possibility as a person.It’s interesting that this character appears in JoJo’s Bizarre Adventure and his famous line is “I’m done with human, JOJO! I will go beyond human being!”